The automotive industry is experiencing rapid growth, leading to an unprecedented increase in vehicle numbers globally. Alongside this growth comes a surge in the complexity of car models, their diverse types, intricate internal structures, and a wide array of potential faults that can be challenging to diagnose. Many automotive maintenance enterprises are finding it increasingly difficult to effectively repair these faults or meet the evolving maintenance demands due to a lack of readily available expert technical guidance. To maximize vehicle uptime and minimize economic losses for both businesses and individuals, there’s a growing need for convenient and accurate vehicle fault detection methods that provide insights into real-time vehicle health.
Expert systems, originating in the 1960s, represent a pivotal application area within the field of artificial intelligence. These intelligent computer programs are knowledge-based systems that leverage the expertise of specialists to tackle complex, domain-specific problems. Over decades of development, expert systems have proliferated across various professional domains, achieving widespread application and continuous advancement. Characterized by their heuristic nature, transparency, and flexibility, expert systems offer a powerful approach to problem-solving in intricate fields.
In the context of automotive repair, expert systems for car fault diagnosis are designed to mimic the diagnostic reasoning of seasoned mechanics to efficiently identify and resolve vehicle malfunctions. These systems primarily utilize data from in-vehicle sensors and electronic control units (ECUs) to gather comprehensive fault information. By employing artificial intelligence algorithms, these systems process this information, analyze potential fault causes, and deliver diagnostic results directly to users. The scope of fault diagnosis encompasses critical vehicle systems, including the engine, chassis, and electrical equipment. Fault diagnosis, therefore, stands as a crucial application of artificial intelligence within the automotive sector, representing a synergy between domain experts and software engineers.
Currently, several models exist for automotive fault diagnosis expert systems, including rule-based, instance-based, behavior-based, fuzzy logic-based, and artificial neural network-based systems. While research in this area has yielded significant progress, current systems still cannot entirely replicate the nuanced thought processes of human experts. For optimal diagnostic outcomes, collaboration between expert systems and human diagnosticians remains essential.
The primary limitations of current automotive fault diagnosis expert systems lie in their knowledge acquisition capabilities and the depth of their knowledge bases. The former is often cited as the most significant barrier to broader adoption and further development. Recognizing these limitations, researchers are actively exploring innovative approaches to enhance expert systems. The future trajectory of automotive fault diagnosis expert systems points towards networking, increased intelligence, and seamless integration within broader vehicle management systems.
The development of intelligent automotive fault diagnosis expert systems is not just a demand but an inevitable trend driven by the rapid evolution of the automotive industry. Integrating neural network technology into these systems has emerged as a critical development direction in recent years. From both theoretical and practical perspectives, fault diagnosis systems powered by neural networks offer distinct advantages in knowledge acquisition, representation, reasoning, learning, and fault tolerance.
This article will delve into the design and implementation of a neural network-based automotive fault diagnosis expert system, highlighting its potential to facilitate efficient fault detection and resolution, ultimately providing practical value in the automotive maintenance domain.
BP Neural Networks: The Engine of Intelligent Diagnosis
Neural networks are computational systems inspired by the structure and function of the human brain. These systems excel at learning, memorization, and complex information processing, making them invaluable in fields like automatic control, artificial intelligence, pattern recognition, and, crucially, fault diagnosis.
Structure of Neural Networks
The neuron, or node, is the fundamental building block of a neural network. It functions as a multi-input, single-output nonlinear processing unit, where its internal state is determined by the weighted sum of its input signals. A neural network is composed of numerous interconnected neurons organized in layers. Based on their connection patterns, neural networks are broadly classified into two main types: feedforward networks and feedback networks.
Feedforward Neural Networks
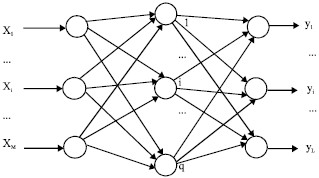
Feedforward networks are the most prevalent type, characterized by a unidirectional flow of information. As depicted in Fig. 1, neurons in each layer receive inputs from the preceding layer and transmit their outputs to the subsequent layer, with no feedback loops within the network.
Fig. 1: System structure of a three-layer feedforward neural network (xi: input, yi: output, hidden layer with q nodes).
Network nodes are categorized as input units and calculation units. Each calculation unit can accept multiple inputs but produces only a single output. Feedforward networks are typically structured in layers: an input layer, one or more hidden layers, and an output layer. Input and output nodes interface with the external environment, while hidden layers perform intermediate computations. This layered architecture facilitates robust learning capabilities with a relatively simple and programmable structure. From a systems perspective, feedforward networks represent static nonlinear mappings. Many feedforward neural networks prioritize classification and pattern recognition tasks over capturing dynamic system behavior.
Feedback Neural Networks
Feedback neural networks, also known as recurrent or regression networks, incorporate feedback connections. In these networks, the input signal establishes the initial state, and the system evolves through a series of state transitions, ideally converging towards an equilibrium. Stability is a critical consideration in feedback networks. All nodes in a feedback neural network act as calculation units, capable of both receiving inputs and producing outputs to the network and externally.
BP Neural Networks: A Workhorse for Fault Diagnosis
Artificial neural networks, particularly the Backpropagation (BP) neural network, are widely employed in pattern recognition and related fields, including fault diagnosis. The BP network is a multilayer feedforward network that utilizes a supervised learning algorithm. Neurons in BP networks commonly use the Sigmoid function as their activation function. During training, the least mean squares learning algorithm is employed, where the error between the network’s actual output and the desired output is propagated backward through the network. This backpropagation process adjusts the connection weights between neurons to minimize the mean square error.
Calculation in Feedforward Neural Networks
Consider the neural network illustrated in Fig. 1, with M input nodes and L output nodes, and a single hidden layer containing q neurons. In the training phase, with N training samples, we select the input Xp and desired output dp of sample p to train the network. The input and output of neuron i in the hidden layer under sample p are given by:
(1) $Input{ip} = sum{j=1}^{M} w{ij} x{jp}$
(2) $O{ip} = f(Input{ip})$
Where:
- $w_{ij}$ is the weight of the connection from input node j to hidden neuron i.
- $x_{jp}$ is the j-th input of sample p.
- $O_{ip}$ is the output of hidden neuron i for sample p.
- $f(.)$ is the Sigmoid activation function.
The derivative of the Sigmoid output function is:
(3) $f'(Input{ip}) = O{ip}(1 – O_{ip})$
The output $O_{ip}$ is then forwarded to neuron k in the output layer, serving as one of its inputs. The input and output of neuron k in the output layer are:
(4) $Input{kp} = sum{i=1}^{q} w{ki} O{ip}$
(5) $y{kp} = f(Input{kp})$
Where:
- $w_{ki}$ is the weight of the connection from hidden neuron i to output neuron k.
- $y_{kp}$ is the output of neuron k for sample p.
If the output $y{kp}$ deviates from the desired output $d{kp}$, an error signal is backpropagated, and connection weights are adjusted iteratively until the output layer neurons produce the desired output values. This process is repeated for all N training samples.
Adjustment of Network Weighted Coefficients
For each sample p, a quadratic error function is defined:
(6) $Jp = frac{1}{2} sum{k=1}^{L} (d{kp} – y{kp})^2$
The total error function for all N training samples is:
(7) $J = sum_{p=1}^{N} Jp = frac{1}{2} sum{p=1}^{N} sum{k=1}^{L} (d{kp} – y_{kp})^2$
The weights are adjusted to minimize this error function J. The weight correction formulas for connections to the output layer and hidden layer are:
(8) $Delta w_{ki} = -eta frac{partial Jp}{partial w{ki}} = eta sum{k=1}^{L} (d{kp} – y{kp}) y{kp} (1 – y{kp}) O{ip}$
(9) $Delta w_{ij} = -eta frac{partial Jp}{partial w{ij}} = eta sum{k=1}^{L} (d{kp} – y{kp}) y{kp} (1 – y{kp}) sum{i=1}^{q} w{ki} O{ip} (1 – O{ip}) x{jp}$
Where $eta$ is the learning rate (0 < $eta$ < 1).
The corrected weight formulas for arbitrary neurons k (output layer) and i (hidden layer) under sample p are:
(10) $w{ki}^{(t+1)} = w{ki}^{(t)} + Delta w{ki} + alpha (w{ki}^{(t)} – w_{ki}^{(t-1)})$
(11) $w{ij}^{(t+1)} = w{ij}^{(t)} + Delta w{ij} + alpha (w{ij}^{(t)} – w_{ij}^{(t-1)})$
Where $alpha$ is the inertia coefficient (0 $leq alpha$ < 1).
Summary of the BP Neural Network Learning Process:
- Initialization: All connection weights are initialized to small random values.
- Training Set Input: The training set, consisting of input vectors Xn and desired output vectors dn, is provided.
- Error Calculation: The error between the network’s actual output and the desired output is calculated.
- Output Layer Weight Adjustment: The weight adjustments for the output layer connections are computed and applied.
- Hidden Layer Weight Adjustment: The weight adjustments for the hidden layer connections are computed and applied.
- Iteration: Steps 3-5 are repeated until the error reaches a predefined acceptable level.
Fault Diagnosis Expert Systems Powered by Neural Networks
Traditional expert systems rely on logical reasoning, progressing through knowledge acquisition, representation, and inference stages, which can be time-consuming. Neural networks, on the other hand, mimic the human brain’s ability to learn from vast amounts of data and respond to patterns. Expert systems and artificial neural networks represent complementary approaches. Combining them harnesses their individual strengths, leading to more robust and practical artificial intelligence applications capable of tackling problems beyond the reach of either technology alone.
Structure of Neural Network Expert Systems
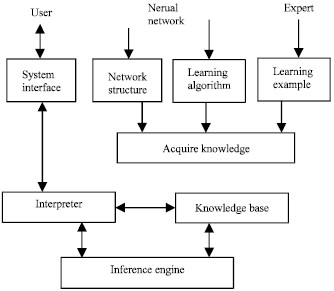
The fundamental architecture of a neural network expert system is depicted in Fig. 2. It is designed for automated module input and the organization and storage of learning examples provided by domain experts.
Fig. 2: Basic structure of a neural network expert system.
By selecting an appropriate neural network architecture and employing suitable learning algorithms, the system can acquire knowledge for its knowledge base. When new learning instances are introduced, the knowledge acquisition module automatically updates the network weights, refining the knowledge base with new information.
Knowledge Acquisition Based on Neural Networks
Knowledge acquisition in neural networks aims to align the system’s outputs with expert-provided answers under identical input conditions. This process endows the network with the problem-solving capabilities of domain experts. In essence, the neural network embodies expert knowledge, and its intelligent behavior mirrors the dynamic adjustments of connection weights between neurons observed in biological systems.
Knowledge can be formalized as specific examples, a format readily digestible by neural networks. The process involves defining the network model and topology, selecting a learning algorithm, and then training the network with examples. Through learning, the network adjusts its weights, effectively acquiring and encoding knowledge. Multilayer feedforward neural networks with supervised training are commonly used. After normalizing data, numerical sample sets are created. During training, network weights are iteratively adjusted based on the error between the actual output and the desired output. Training continues until the mean square error falls below a predetermined threshold. At this point, the neural network has successfully extracted knowledge from the provided examples and stored it within its network structure.
Knowledge Representation in Neural Networks
Neural networks primarily represent knowledge in two ways:
-
Rule-Based Representation: Expert knowledge is translated into rules, often expressed as production rules (e.g., IF A THEN B), and stored in the knowledge base. These rules capture explicit expert reasoning.
-
Data-Driven Representation: The neural network is trained using historical data or expert experience, enabling it to discover new diagnostic rules and expand its knowledge base autonomously. This self-learning capability is a key advantage of fault diagnosis expert systems based on neural networks.
Inference Mechanisms in Neural Network Expert Systems
Inference mechanisms in fault diagnosis expert systems typically fall into three categories: forward reasoning, backward reasoning, and mixed bidirectional reasoning. Neural network-based fault diagnosis expert systems generally employ forward reasoning. The trained neural network performs computations, starting from an initial state and progressing forward until a target state (diagnosis) is reached. This reasoning process is essentially the forward propagation of signals through the network. Known symptom vectors serve as input patterns, and the network’s output provides the corresponding fault vector.
Compared to traditional expert systems, this direct reasoning approach in neural network expert systems offers advantages such as faster inference and inherent conflict resolution.
Designing a Neural Network-Based Automotive Fault Diagnosis Expert System
A fault diagnosis expert system built on a neural network can identify the type of fault, provided the network is trained with diverse fault examples. Once trained, the system can quickly analyze new input data and determine the nature of equipment malfunctions.
Failure Mode Analysis of Engine Abnormal Sounds
Over extended use and increasing mileage, a vehicle’s mechanical condition gradually deteriorates. This deterioration often manifests as abnormal sounds, fluid leaks, overheating, power loss, increased fuel consumption, and excessive vibrations.
Table 1: Codes and fault phenomena associated with abnormal engine sounds.
| Code | Fault Phenomenon (xi, i=1 to 17) |
|---|---|
| x1 | Sound increases with engine speed |
| x2 | Sound is more evident during cold starts |
| x3 | Sound is load-dependent |
| x4 | Intermittent sound |
| x5 | Metallic knocking sound |
| x6 | Muffled knocking sound |
| x7 | Regular knocking sound |
| x8 | Irregular knocking sound |
| x9 | Sound from upper engine area |
| x10 | Sound from lower engine area |
| x11 | Sound from front engine area |
| x12 | Sound from rear engine area |
| x13 | Sound present at idle |
| x14 | Sound disappears at higher RPM |
| x15 | Sound present during acceleration |
| x16 | Sound present during deceleration |
| x17 | Sound present under load |
Failures in automotive mechanical systems are frequently indicated by abnormal noises. The engine, being a complex assembly, can generate noise for various reasons. Abnormal engine sounds serve as valuable indicators of potential faults and convey rich diagnostic information.
This study exemplifies the design of a neural network-based automotive fault diagnosis expert system using abnormal engine sounds as a case study. Engine noise arises from vibrations and sound waves originating from engine components. The presence of abnormal sounds often signifies underlying faults. Common abnormal engine sounds include piston cylinder knocking, piston pin knocking, connecting rod bearing knocking, and crankshaft bearing knocking, designated as codes y1, y2, y3, and y4, respectively. These codes correspond to 17 fault phenomena, as detailed in Table 1.
Establishing the Fault Diagnosis Neural Network
The architecture of the neural network is determined by the input features (abnormal sound phenomena) and the desired outputs (fault types). Based on the analysis, a three-layer BP neural network is selected, featuring 17 nodes in the input layer (corresponding to the 17 fault phenomena) and 4 nodes in the output layer (representing the four types of abnormal engine sounds).
Determining the optimal number of nodes in the hidden layer is more intricate. Too few nodes may hinder network training and pattern recognition, resulting in poor fault tolerance. Conversely, excessive nodes can prolong training time without necessarily improving accuracy. An optimal number of hidden layer nodes exists. A heuristic formula for estimating the number of hidden layer nodes is:
(12) $n_2 = sqrt{n_1 + n_3} + alpha$
Where:
- $n_1$ is the number of input layer nodes (17).
- $n_3$ is the number of output layer nodes (4).
- $alpha$ is an adjustment value typically ranging from 1 to 10.
Considering these factors, the number of hidden layer nodes ($n_2$) is set to 7 for this expert system.
Sample Selection for Neural Network Training
Based on fault diagnosis scenarios, training samples and corresponding desired outputs are compiled, as shown in Table 2 and Table 3.
Table 2: Eight training samples of fault phenomena for BP neural network automotive fault diagnosis expert system.
| Sample | x1 | x2 | x3 | x4 | x5 | x6 | x7 | x8 | x9 | x10 | x11 | x12 | x13 | x14 | x15 | x16 | x17 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 |
| 2 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 |
| 4 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 |
| 5 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| 6 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | 0 |
| 7 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| 8 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
Table 3: Eight desired outputs for training samples of abnormal engine sounds.
| Sample | y1 (Piston Cylinder Knocking) | y2 (Piston Pin Knocking) | y3 (Connecting Rod Bearing Knocking) | y4 (Crank Bearing Knocking) |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
| 5 | 1 | 0 | 0 | 0 |
| 6 | 0 | 1 | 0 | 0 |
| 7 | 0 | 0 | 1 | 0 |
| 8 | 0 | 0 | 0 | 1 |
Table 4: Actual output of BP neural network when training samples are input.
| Sample | y1 (Piston Cylinder Knocking) | y2 (Piston Pin Knocking) | y3 (Connecting Rod Bearing Knocking) | y4 (Crank Bearing Knocking) |
|---|---|---|---|---|
| 1 | 0.98 | 0.02 | 0.01 | 0.03 |
| 2 | 0.04 | 0.97 | 0.05 | 0.01 |
| 3 | 0.02 | 0.03 | 0.96 | 0.04 |
| 4 | 0.01 | 0.01 | 0.02 | 0.99 |
| 5 | 0.95 | 0.06 | 0.03 | 0.02 |
| 6 | 0.07 | 0.93 | 0.02 | 0.05 |
| 7 | 0.03 | 0.04 | 0.94 | 0.02 |
| 8 | 0.01 | 0.02 | 0.01 | 0.97 |
Training Results and Analysis
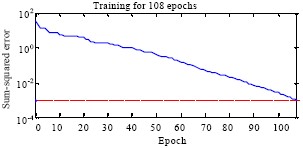
In this BP neural network-based automotive fault diagnosis expert system, the training error target is set to 0.001. After inputting the training samples, the test results are shown in Table 4.
As evident from Tables 3 and 4, the actual outputs of the neural network closely match the desired outputs. This high degree of correlation indicates the accuracy and reliability of the BP neural network-based fault diagnosis method.
Fig. 3: Learning error reduction during training.
Fig. 3 illustrates the relationship between the learning error and the number of training epochs. The graph shows that the error target is achieved after approximately 108 training steps, meeting the fault diagnosis accuracy requirements. Furthermore, adjusting the error target reveals a corresponding change in training steps and time. A smaller error target necessitates longer training times and more training steps. These results demonstrate the strong diagnostic capabilities of the network, provided with sufficient training samples.