The automotive industry is experiencing unprecedented growth and complexity. Modern vehicles boast intricate designs, diverse models, and sophisticated internal systems. This complexity, while offering enhanced performance and features, also leads to increasingly challenging fault diagnosis and repair. Many automotive maintenance enterprises are struggling to keep pace, often lacking the expert technical guidance needed to efficiently and effectively address complex vehicle malfunctions. This situation results in prolonged vehicle downtime, increased economic losses for vehicle owners, and a growing demand for more accessible and intelligent diagnostic solutions. Vehicle owners need methods that not only quickly detect faults but also provide insights into the real-time health and operational status of their vehicles.
This is where the power of expert systems comes into play. Emerging from the field of artificial intelligence in the 1960s, expert systems are intelligent computer programs designed to mimic the problem-solving abilities of human experts in specific domains. In the realm of automotive repair, Car Fault Diagnosis Expert Systems are revolutionizing how technicians approach vehicle maintenance. These systems leverage vast knowledge bases and sophisticated algorithms to diagnose problems that might stump even seasoned mechanics. Characterized by their heuristic approach, transparency in reasoning, and adaptability, these systems are becoming indispensable tools in modern garages.
A car fault diagnosis expert system essentially emulates the diagnostic thought process of a master mechanic. By integrating with a vehicle’s onboard sensors and electronic control units (ECUs), these systems gather comprehensive fault data. They then employ artificial intelligence algorithms to process this information, analyze the root causes of malfunctions across various vehicle systems – from the engine and chassis to electrical equipment – and deliver clear, actionable diagnostic results to users. Fault diagnosis, therefore, represents a pivotal application of artificial intelligence within the automotive sector, born from the collaboration of domain experts and software engineers.
Currently, the landscape of car fault diagnosis expert systems includes various models, each with its strengths: rule-based systems that follow pre-defined logic, instance-based systems that learn from past cases, behavior-based systems that monitor vehicle performance, fuzzy logic systems that handle uncertainty, and artificial neural network-based systems that excel at pattern recognition and learning. While significant progress has been made, these systems are not intended to entirely replace human expertise. Instead, the most effective approach involves collaboration between these intelligent systems and skilled technicians, leveraging the strengths of both to achieve optimal diagnostic outcomes.
The primary limitations of current car fault diagnosis expert systems lie in knowledge acquisition and the depth of system knowledge. The challenge of effectively capturing and encoding expert knowledge remains a significant hurdle to broader adoption and increased utility. However, the future of these systems is bright, with key development trends pointing towards greater networking capabilities, enhanced intelligence through advanced AI, and seamless integration into broader automotive ecosystems. The evolution of car fault diagnosis expert systems is undeniably towards more intelligent, interconnected, and comprehensive solutions.
The development of intelligent car fault diagnosis expert systems is not merely a technological advancement; it is a necessary evolution driven by the rapid advancements in the automotive industry. The integration of neural network technology into these systems marks a significant leap forward. From both theoretical and practical perspectives, neural network-based fault diagnosis systems offer distinct advantages in knowledge acquisition, representation, reasoning, learning, and fault tolerance. They learn from data, adapt to new situations, and provide robust diagnostic capabilities even in the face of incomplete or noisy information.
This article delves into the design and implementation of a car fault diagnosis expert system grounded in neural network principles. This system aims to provide a practical tool for efficiently identifying and resolving vehicle faults, contributing to improved vehicle utilization and reduced downtime for vehicle owners. The focus will be on explaining the underlying principles of neural networks, their application in fault diagnosis, and the architecture of a neural network-based expert system.
Understanding BP Neural Networks in Car Diagnostics
Neural networks, inspired by the structure and function of the human brain, are information processing systems capable of learning, memorizing, and performing complex intelligent tasks. Their ability to discern patterns, adapt to new data, and make predictions has made them invaluable across diverse fields, including automatic control, artificial intelligence, pattern recognition, and, crucially, fault diagnosis.
Neural Network Structure: The fundamental building block of a neural network is the neuron, a computational unit that mimics the behavior of biological neurons. A neuron receives multiple inputs, processes them, and produces a single output. Internally, a neuron’s state is determined by the weighted sum of its input signals. Neural networks are constructed from layers of interconnected neurons. Based on their connection patterns and information flow, neural networks are broadly classified into feedforward and feedback networks.
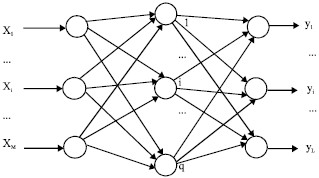
Feedforward Neural Networks: Feedforward networks are the most common type, characterized by a unidirectional flow of information. As depicted in Fig. 1, neurons in each layer receive inputs from the preceding layer and transmit their outputs to the subsequent layer. There are no feedback loops within the network.
Within a feedforward network, nodes are categorized as input units or calculating units. Each calculating unit can accept multiple inputs but produces only one output. These networks are typically organized into layers: an input layer, an output layer, and one or more hidden layers in between. The input and output layers interface with the external environment, while hidden layers perform intermediate computations. This layered structure enables the network to learn complex non-linear mappings between inputs and outputs, making them powerful tools for tasks like classification and pattern recognition. Feedforward networks are particularly adept at static non-linear mapping and excel in pattern recognition tasks.
Feedback Neural Networks: Feedback neural networks, also known as recurrent or regression networks, incorporate feedback connections. In these networks, the input signal sets the initial state, and the system evolves through a series of state transitions until it reaches a stable equilibrium. Stability is a critical consideration in feedback networks. All nodes in a feedback network are calculating units, capable of both receiving inputs and producing outputs.
BP Neural Networks: Among the various neural network architectures, Backpropagation (BP) neural networks are widely used, especially in pattern recognition and fault diagnosis. BP networks are multilayer feedforward networks trained using a supervised learning algorithm. They typically employ a Sigmoid activation function for neurons, which introduces non-linearity and allows the network to learn complex relationships. The learning process involves adjusting the connection weights between neurons to minimize the error between the network’s output and the desired output. This adjustment is achieved through a process of backward error propagation, hence the name “backpropagation.”
Forward Calculation in BP Networks: Consider the three-layer BP network illustrated in Fig. 1, with M input nodes, L output nodes, and a hidden layer with q neurons. During the learning phase, the network is trained using N samples. For sample p, the input Xp and desired output dp are used. The input and output of neuron i in the hidden layer are calculated as follows:
(1) Input to hidden layer neuron i:
(2) Output of hidden layer neuron i:
where:
wijrepresents the weight of the connection from input node j to hidden neuron i.Oiis the output of hidden neuron i.f(.)is the Sigmoid activation function.
(3) Derivative of the Sigmoid function:
The output Oi from the hidden layer is then transmitted forward to neuron k in the output layer, serving as an input.
(4) Input to output layer neuron k:
(5) Output of output layer neuron k:
If the network output does not match the desired output dk, an error signal is propagated backward through the network. During this propagation, the connection weights are adjusted iteratively until the output layer produces the desired values. This process is repeated for all N training samples.
Weight Adjustment in BP Networks: For each sample p, a quadratic error function Jp is defined:
(6) Error function for sample p:
The total error function J across all N training samples is:
(7) Total error function:
The goal of the learning process is to minimize this total error function. This is achieved by adjusting the weights in the direction that reduces J.
(8) Weight correction formula for the output layer:
(9) Weight correction formula for the hidden layer:
where:
ηis the learning rate (0 < η < 1), controlling the step size of weight adjustments.
For arbitrary neurons k in the output layer and j in the hidden layer, the weight correction formulas under sample p become:
(10) Weight correction for output layer neuron k:
(11) Weight correction for hidden layer neuron j:
where:
αis the inertia coefficient (0 ≤ α < 1), adding momentum to the weight updates and potentially speeding up convergence.
BP Network Learning Process Summary:
- Initialization: Initialize all connection weights to small random numbers.
- Training Sample Input: Present a training sample with input vector Xn and desired output vector dn.
- Error Calculation: Calculate the error between the network’s actual output and the desired output.
- Output Layer Weight Adjustment: Compute and adjust the weights of the output layer using the error signal.
- Hidden Layer Weight Adjustment: Compute and adjust the weights of the hidden layer using the backpropagated error signal.
- Iteration: Repeat steps 3-5 for all training samples until the error meets a predefined threshold.
Neural Network-Based Expert Systems for Automotive Fault Diagnosis
Traditional expert systems rely on logical reasoning, requiring extensive knowledge acquisition, representation, and reasoning stages, often a time-consuming process. Neural networks, on the other hand, mimic the human brain’s ability to learn from experience and respond to events based on patterns in large datasets. Expert systems and neural networks represent complementary approaches to artificial intelligence. Combining them can leverage their unique strengths, creating more robust and practical AI systems capable of solving problems that neither approach can handle effectively alone.
Structure of a Neural Network Expert System: The fundamental architecture of a neural network-based expert system is shown in Fig. 2. It is designed to automatically acquire knowledge, organize it, and learn from expert-provided examples.
The system utilizes a neural network architecture and a learning algorithm to extract knowledge and build a knowledge base. When new information or a learning instance is provided, the knowledge acquisition module updates the network weights, effectively updating the knowledge base and enabling continuous learning.
Knowledge Acquisition with Neural Networks: In a neural network-based expert system, knowledge acquisition is the process of training the network to produce outputs that align with expert judgments for given inputs. The goal is to imbue the network with the problem-solving capabilities of domain experts. This learning process mirrors how biological neural networks, and by extension human intelligence, arise from changes in the connection strengths between neurons.
Neural networks excel at learning from examples. The knowledge is formalized as input-output pairs, and the network learns to map inputs to desired outputs. The process begins with selecting a suitable network model and topology, followed by training the network on a dataset of examples using a chosen learning algorithm. Through learning, the network adjusts its connection weights, effectively acquiring and storing knowledge. Multilayer feedforward networks trained with supervised learning are a typical choice. After preprocessing and normalization of data, numerical sample sets are constructed. During training, network weights are adjusted based on the error between the actual output and the desired output. The network training continues until the average error falls below a predetermined threshold. At this point, the neural network has successfully learned from the provided examples and encoded this knowledge within its network weights.
Knowledge Representation in Neural Networks: Neural networks offer two primary methods for representing knowledge:
-
Rule-Based Representation: Expert knowledge can be translated into production rules (IF-THEN rules) and stored in a knowledge base. These rules explicitly define relationships between conditions and conclusions. However, this method can be limited in capturing the nuanced and implicit knowledge that neural networks can learn directly from data.
-
Implicit Representation through Network Weights: Alternatively, knowledge can be implicitly represented within the connection weights of the trained neural network. This approach allows the system to learn diagnostic rules directly from historical data or expert experience, effectively expanding the knowledge base and enabling self-learning. This ability to learn and adapt is a key advantage of neural network-based fault diagnosis expert systems.
Inference Mechanism in Neural Networks: Fault diagnosis expert systems typically employ inference mechanisms to derive conclusions from available knowledge. Common methods include direct reasoning (forward chaining), back reasoning (backward chaining), and mixed reasoning. Neural network-based systems generally utilize direct reasoning. The trained neural network performs computations starting from an initial state (input symptoms) and proceeds forward until a target state (diagnosis) is reached. This reasoning process is essentially the forward calculation process within the network. By feeding a symptom vector as input, the network calculates the output, which represents the diagnosed fault vector.
Compared to traditional rule-based expert systems, the direct reasoning approach in neural network systems offers advantages such as faster reasoning and inherent conflict resolution. The network’s learned weights implicitly encode complex relationships, enabling efficient and robust diagnosis.
Designing a Neural Network-Based Car Fault Diagnosis Expert System
A car fault diagnosis expert system based on neural networks can effectively identify fault types by learning from diverse training examples. Once trained, the system can rapidly analyze new input data and determine the type of failure affecting a vehicle.
Case Study: Engine Abnormal Sound Diagnosis: Vehicle condition deteriorates over time, often manifested through symptoms like abnormal sounds, fluid leaks, overheating, power loss, increased fuel consumption, and vibrations. Abnormal engine sounds, in particular, are often reliable indicators of underlying mechanical issues.
Table 1: Codes and fault phenomena of abnormal engine sounds.
Engine noise, generated by vibrations and sound waves from engine components, can signal various malfunctions. Abnormal sounds are rich in diagnostic information. This study uses engine abnormal sound diagnosis as an example to illustrate the design of a neural network-based fault diagnosis expert system. Common abnormal engine sounds, such as piston cylinder knocking, piston pin knocking, connecting rod bearing knocking, and crankshaft bearing knocking, are assigned codes y1, y2, y3, and y4, respectively, and are associated with 17 fault phenomena (x1 to x17), as detailed in Table 1.
Neural Network Architecture for Fault Diagnosis: The architecture of the neural network is determined by the number of input features (fault phenomena) and output classes (abnormal sound types). Based on the analysis, a three-layer BP neural network is chosen. The input layer has 17 nodes, corresponding to the 17 fault phenomena, and the output layer has 4 nodes, representing the four types of abnormal engine sounds.
Determining the optimal number of hidden layer nodes is more complex. Too few nodes may limit the network’s learning capacity and fault tolerance, while too many nodes can lead to overfitting, increased training time, and not necessarily improved accuracy. Therefore, there typically exists an optimal number of hidden nodes. A common heuristic formula for estimating the number of hidden nodes is:
(12) Heuristic formula for hidden layer nodes:
n2 = sqrt(n1 + n3) + αwhere:
n1is the number of input layer nodes (17).n3is the number of output layer nodes (4).αis an adjustment value typically in the range [1, 10].
Considering this formula and empirical experience, the number of hidden layer nodes n2 is set to 7 for this expert system.
Training Sample Selection: Based on fault diagnosis scenarios, training samples are created, mapping fault phenomena (inputs) to abnormal sound types (outputs). Table 2 and Table 3 show a set of eight training samples used for this system.
Table 2: Training samples of fault phenomena for BP neural network.
Table 3: Desired outputs for training samples of abnormal engine sounds.
Training Results and Analysis: The BP neural network was trained with a target error of 0.001. The training samples were fed into the system, and the test results are shown in Table 4.
Table 4: Actual output of the BP neural network after training.
Comparing Table 3 and Table 4, it’s evident that the actual network outputs closely match the desired outputs. This demonstrates the high accuracy and reliability of the BP neural network-based fault diagnosis method.
Fig. 3 illustrates the relationship between the learning error and training epochs. The graph shows that the error target is achieved within 108 training steps, indicating efficient learning. Furthermore, the training time and steps adjust proportionally to changes in the error requirement. A smaller error target necessitates longer training. The results also highlight that with sufficient training data, the network develops robust diagnostic capabilities.
In conclusion, car fault diagnosis expert systems, particularly those leveraging neural network technology, offer a powerful approach to modern automotive repair. They promise faster, more accurate diagnoses, reduced vehicle downtime, and enhanced efficiency for automotive maintenance professionals. As AI continues to evolve, these systems will play an increasingly critical role in keeping vehicles running smoothly and reliably.
